


For LEAP Hand
by Carnegie Mellon University
The LEAP Hand, developed by Carnegie Mellon University, is a dexterous and anthropomorphic robotic hand built for high-performance manipulation tasks. Its novel kinematic structure maintains consistent dexterity across a wide range of finger poses, making it suitable for complex handling applications.
XELA Robotics has equipped the LEAP Hand with 368 integrated tactile sensors, providing high-resolution contact feedback across the entire hand surface. This enables precise control, improved adaptability, and enhanced reliability in demanding environments.
This combination offers a capable and accessible solution for industries requiring advanced robotic manipulation with detailed tactile awareness.
Type of sensor: uSkin Patch
Product code: uSPa 44
Sensor modules: 11
Taxels per module: 16
Total: 176
Type of sensor: uSkin Patch
Product code: uSPa 46
Sensor modules: 3
Taxels per module: 24
Total: 72
Type of sensor: uSkin Curved
Product code: uSCu ALHA
Sensor modules: 4
Taxels per module: 30
Total: 120
In total:
368 tri-axial tactile sensors
Summary:
30 in each fingertip
16 in each phalange
62 in thumb
78 in each finger (except thumb)
72 in each palm



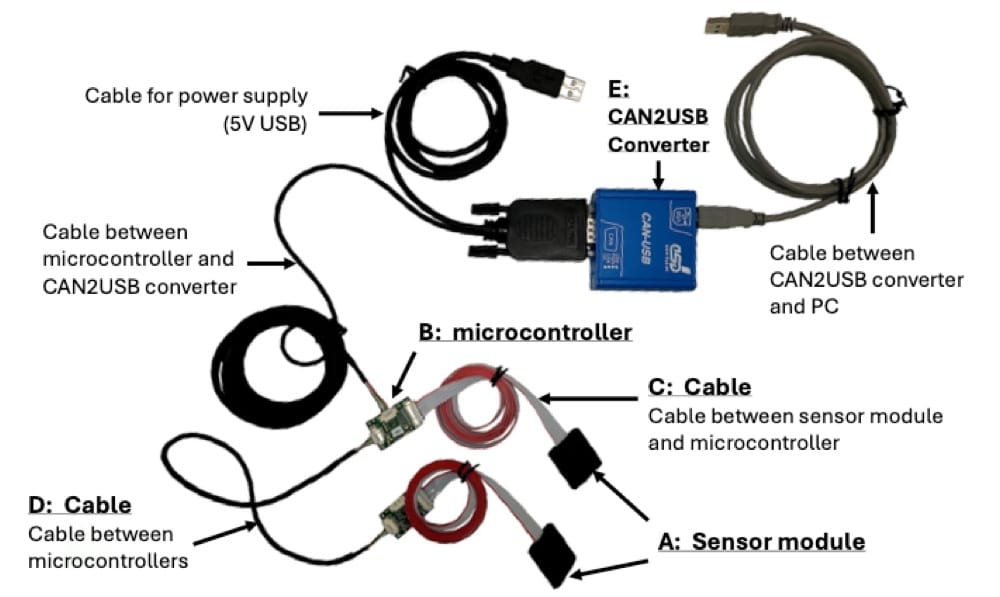
Sensors connect directly to uAi Software for visualization, calibration, and compensation, providing consistent tactile data across diverse applications.
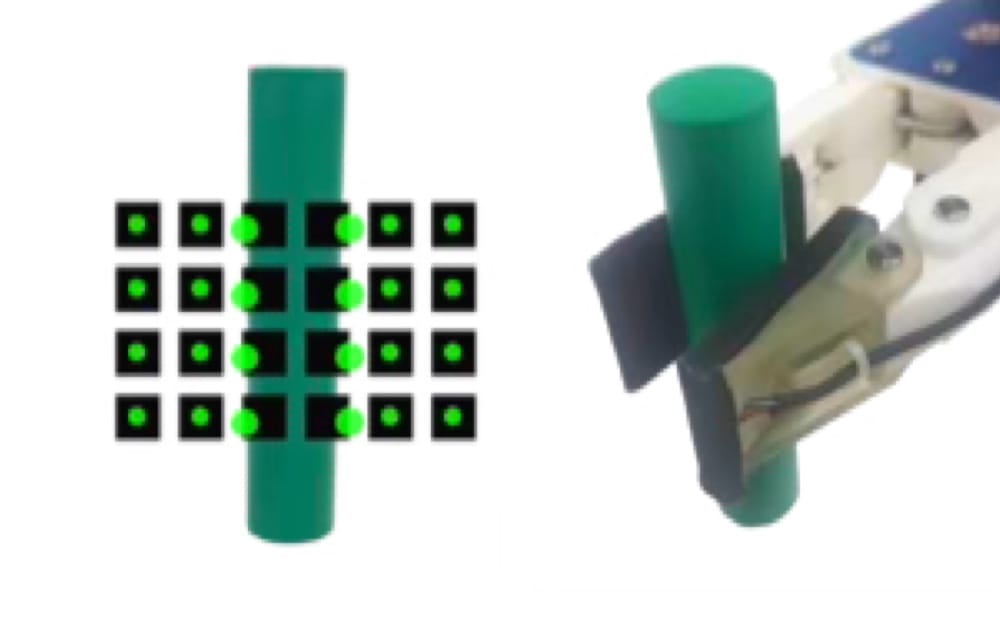
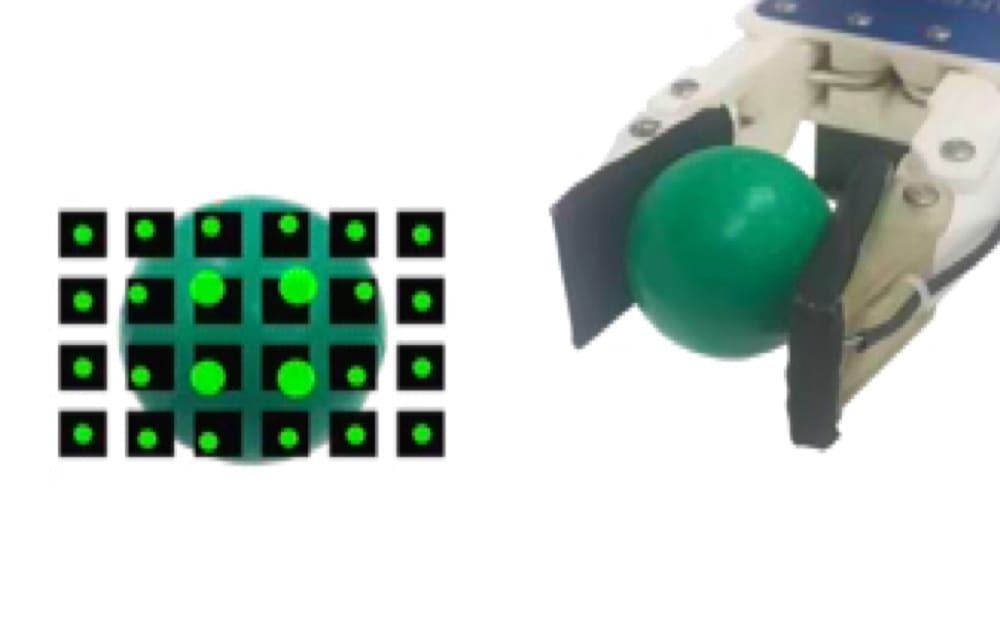
Compact Sensing Points



Distributed 3-axis Sensing
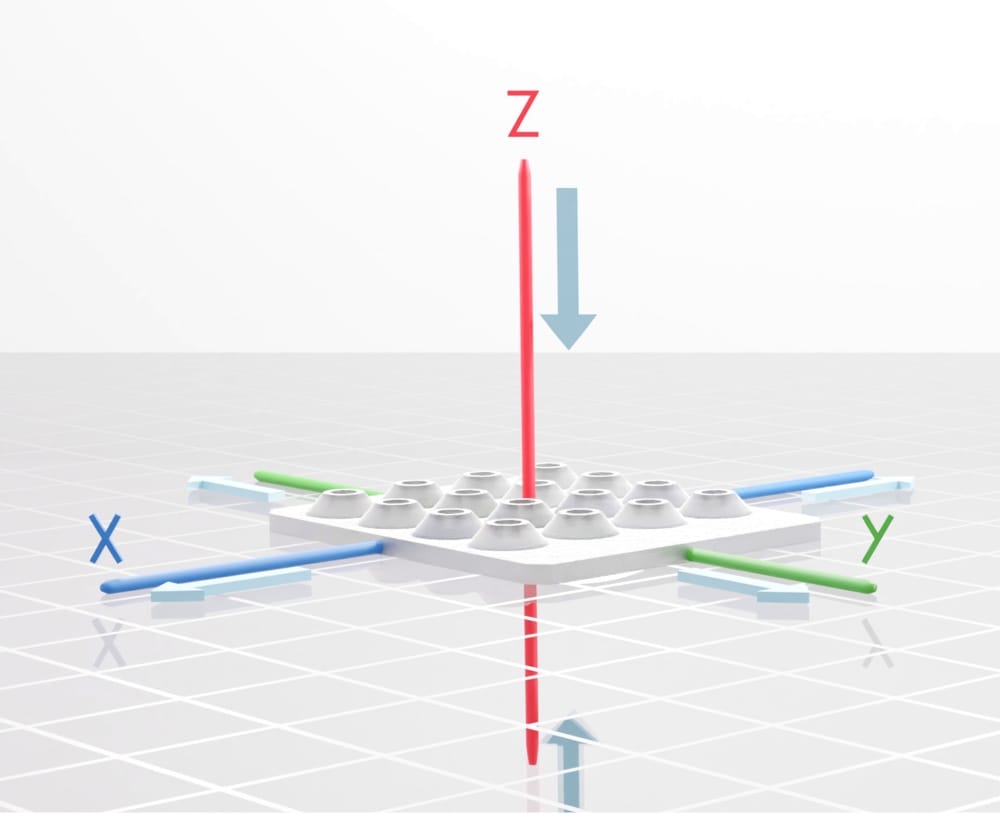
Sensitive: 0.1 gram-force Resolution

Soft & Robust
Minimal Wiring & Fast Sampling: 500 Hz
Easy to Integrate & Use
Calibrated to Newton
Temperature & Magnetic Compensation
Process, visualize, and analyze tactile data with uAi software
XELA’s software platform for processing tactile data from uSkin sensors.