High-density 3-axis tactile sensing in a thin, soft, durable package engineered with minimal wiring
Sensor Structure
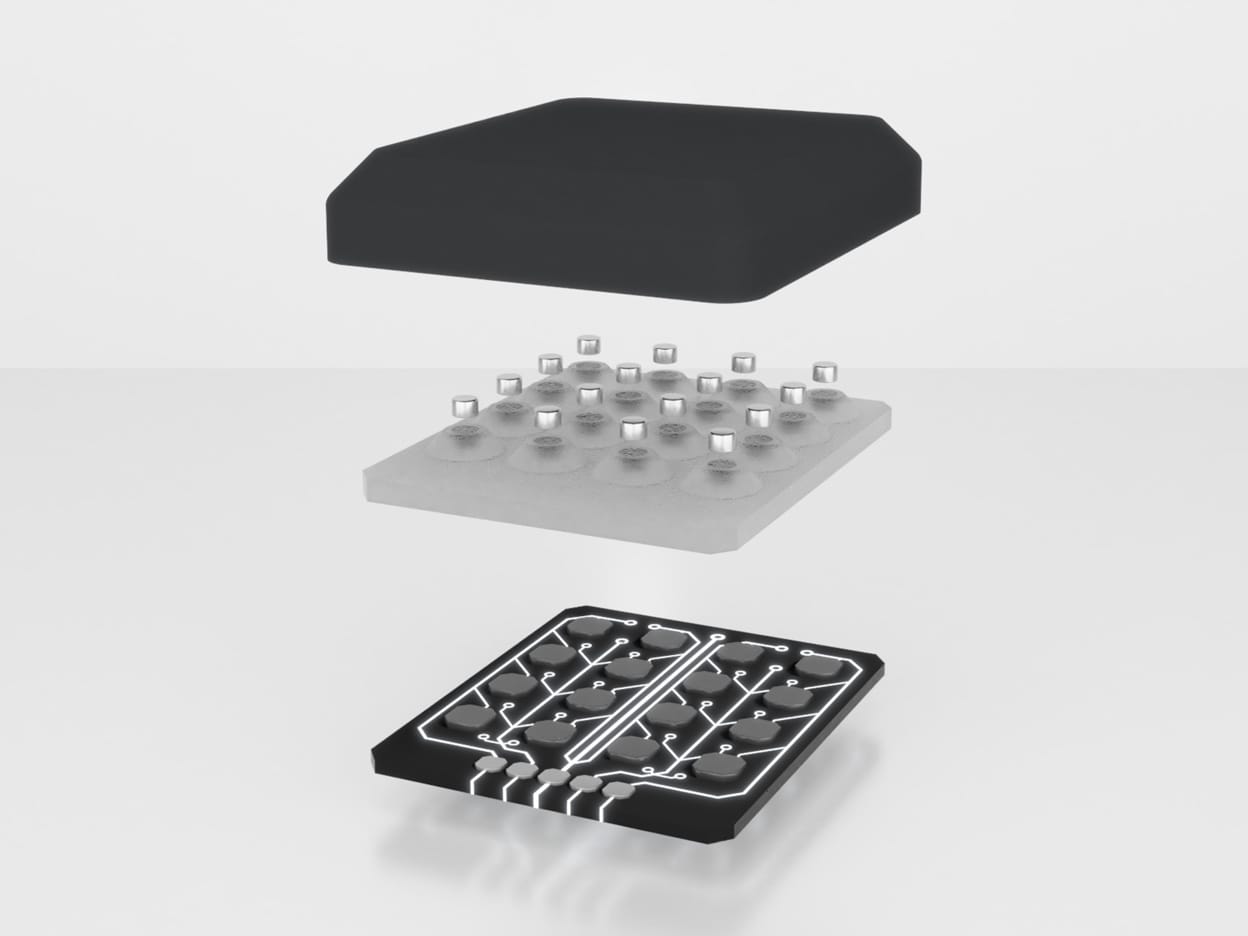
uSkin consists of three main layers
The outer shell creates a smooth surface and protects the sensors themselves. It can be adapted for different applications.
Soft elastomer ensures that the sensor is highly resilient to overloading, which makes uSkin very durable. Another feature that soft skin adds to the sensor is the ability to conform to the object your robotic solution is trying to grasp.
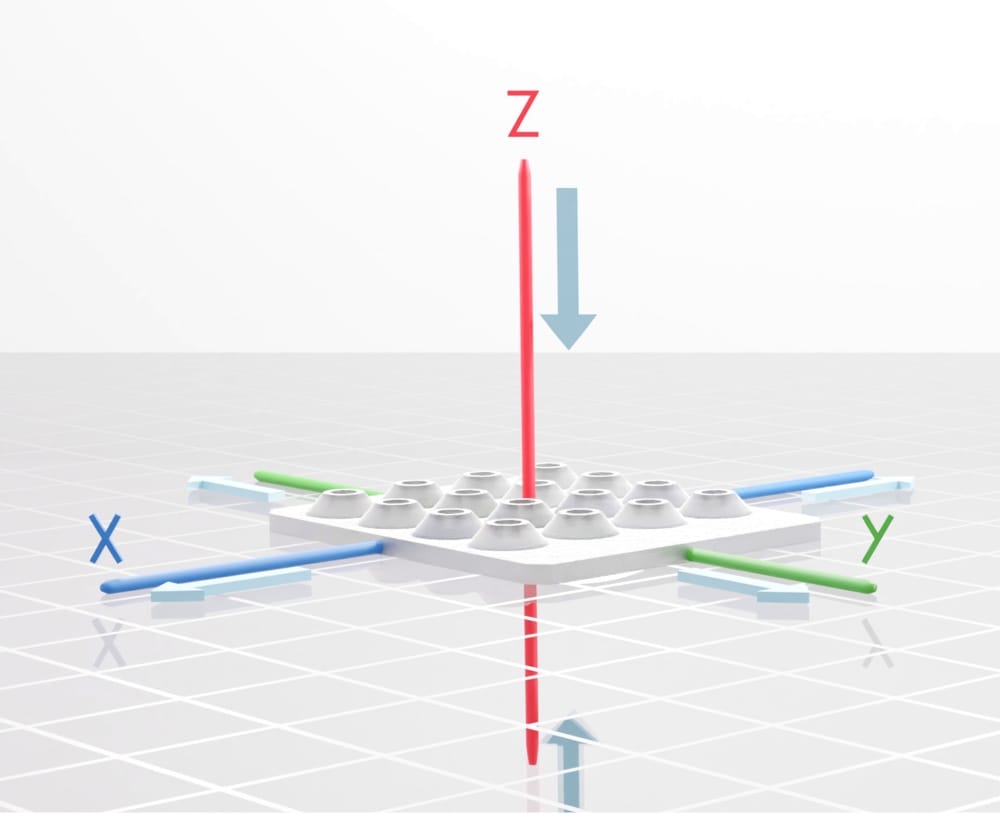
Each chip recognizes displacement in three dimensions. A sensor module includes a multitude of these chips, and each chip can measure 3D displacement individually.
Sensors connect directly to uAi Software for visualization, calibration, and compensation, providing consistent tactile data across diverse applications.
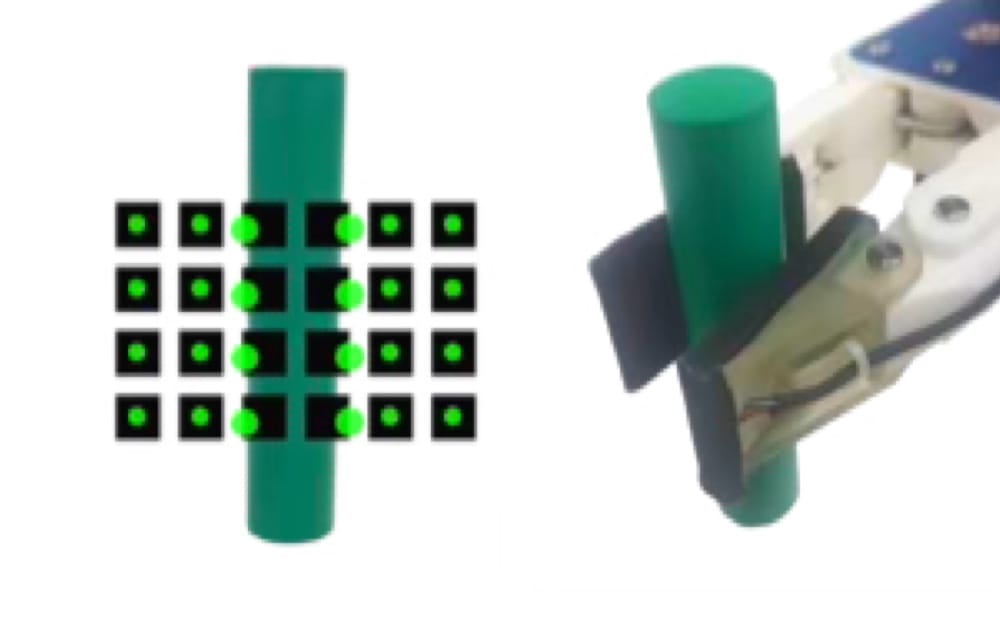
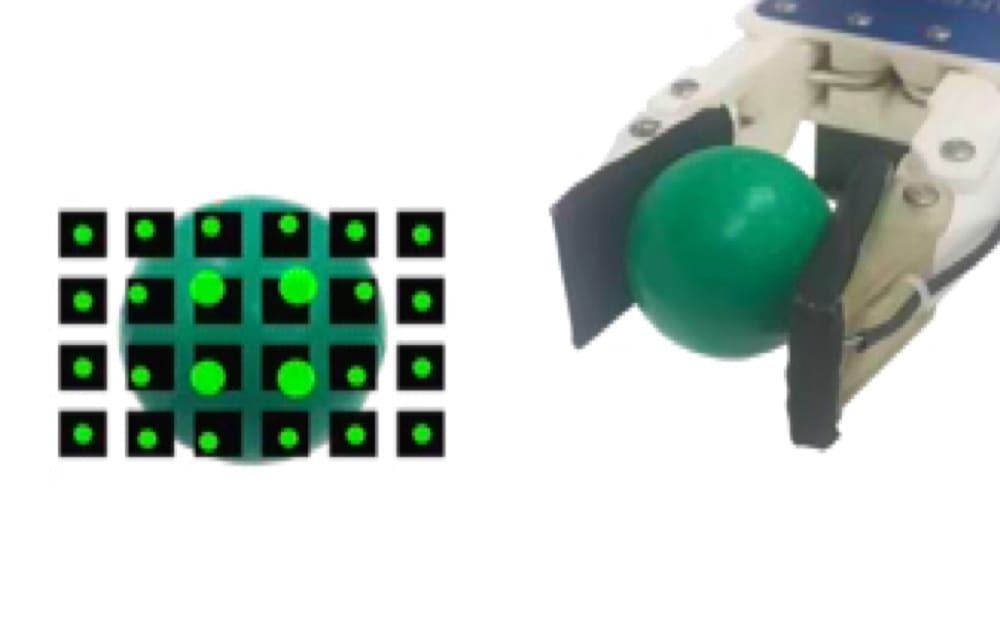
Compact Sensing Points



Distributed 3-axis Sensing
Sensitive: 0.1 gram-force Resolution

Soft & Robust
Minimal Wiring & Fast Sampling: 500 Hz
Easy to Integrate & Use
Calibrated to Newton
Temperature & Magnetic Compensation
Process, visualize, and analyze tactile data with uAi software
XELA’s software platform for processing tactile data from uSkin sensors.
Design tactile sensors tailored to your robot with custom integration, shape, and data options
XELA offers flexible sensor design and integration services to match your robot’s geometry, wiring, and tactile requirements.