Physical AI with a Human Touch
Reimagine Automation with Tactile Data
Potential Solutions
Explore real-world applications that showcase the versatility of our tactile sensing technology.

Assembly: Insertion tasks
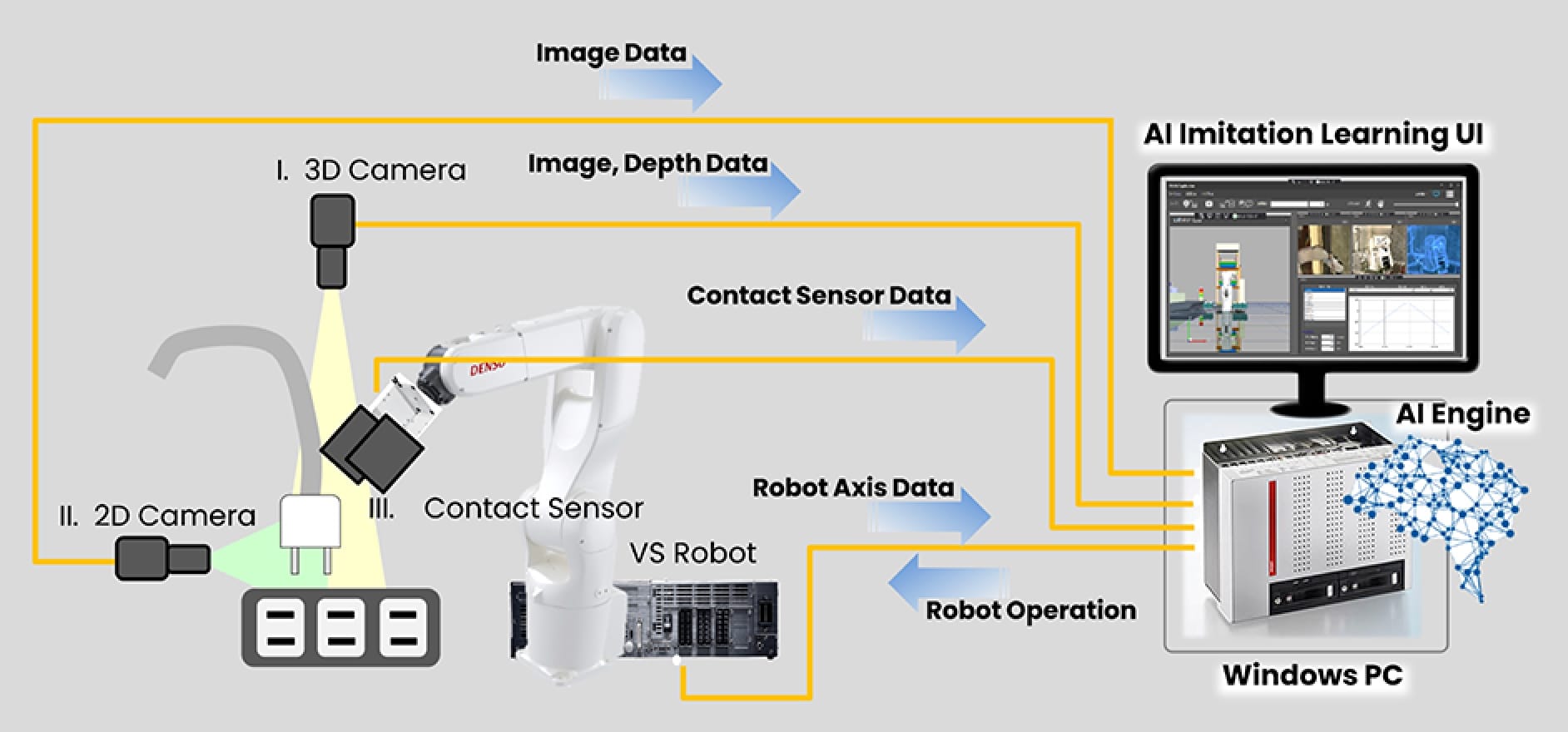
Full automation of assembly in manufacturing plants has not yet been achieved. For instance during insertion tasks, small misalignments from vision systems can lead to damage, e.g. when inserting a cable into a socket, memory into a motherboard, or even plugging in an electric vehicle. Humans use their sense of touch to detect if an object is in the right place and adjust the position if needed. Like humans, with uSkin & uAi, robots can solve those tasks.
Features we can provide
Detect orientation of grasped object
Measure forces during insertion
Detect misalignment and adjust position
Warehouse: Pick & Place tasks
Many tasks in a warehouse are already automated, but picking unknown objects in random orientations is still done manually. In a different scenario, a robot cannot detect how many screws it picked from a container, as it cannot see inside of the closed gripper. To solve those issues, tactile data is required. uSkin & uAi allow to:
Features we can provide
Control grasping force based on non-visual parameters such as weight, hardness and texture
Control grasping position & predict likeliness of dropping objects based on contact area and center of gravity
Detect slip and adjust grasping force


Delicate Fruit Picking & Sorting
Sensors provide detailed information about physical properties to support automation, helping prevent product damage, detect ripeness and reduce waste while increasing yield.

Gear & Apparel
Tactile sensors optimize products by providing insights into performance and comfort.

Gaming
3D tactile sensing offers technical advantages like high resolution, sensitivity, and fast response time for gaming controllers.
Selected Use Cases
Research & Development
Gripping and opening a deformable bag
Tactile data controls force while handling soft materials.

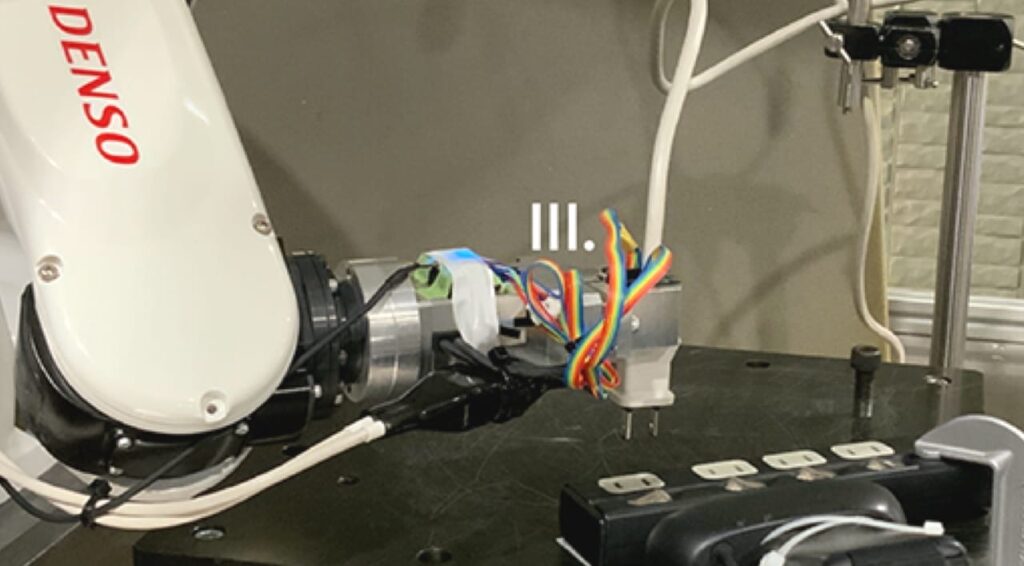
Research & Development
Grasping a cable plug and inserting it into an outlet
Tactile data helps stabilize grip and guide alignment.

Trusted by over 50 clients
Our Products
Sensors connect directly to uAi Software for visualization, calibration, and compensation, providing consistent tactile data across diverse applications.
Explore detailed model specifications, integrations, and available sensor types in our latest product catalog
Download the PDF to find compatible modules or start planning your customization.